
Tasmotizer: Debian GNU/Linux

Tasmota es un firmware de código abierto alternativo para placas con el chip ESP8266 y de forma experimental ESP32 con funciones para poder domotizar sistemas.
Los creadores de dicho firmware han decidido simplificar la tarea de programar los chips ESP con una aplicación llamada Tasmotizer.
Tasmotizer no es más que una aplicación diseñada en Python 3 que gracias a la herramienta integrada ESPtool by Espressif permite el flasheo de los dispositivos ESP mediante una interfaz gráfica muy comoda.
Las principales novedades son:
- Realiza una copia de seguridad del firmware actual antes del flasheo para poder volver atrás (Backups de hasta 16MB almacenamiento)
- Puede flashear un fichero local
.bino bien los descarga de susrepositorios de Internet bajo demanda. - Permite la configuración inicial para evitar tener que conectarnos al dispositivo, pudiendo dejar listo la WiFi, MQTT, Módulo o bien el Template a usar.
Instalación
Comenzamos actualizando repositorios e instalando dependencias:
sudo apt-get update && \
sudo apt-get -y install python3-pip
Instalamos las dependencias y software Tasmotizer:
sudo pip3 install PyQt5 pyserial tasmotizer --break-system-packages
Fix
En el momento de escribir la entrada se encontraron unos fallos que no permitian la correcta ejecución del programa.
Vamos a ver como solucionarlas en las versiones de Debian probadas.
Debian 10: Fix
NOTA: Comentar que el proceso ha sido probado sobre Debian 10 y Python 3.7
El bug en el momento de escribir la entrada debemos de crear un enlace símbolico a la librería XCB:
sudo ln -s /usr/lib/x86_64-linux-gnu/libxcb-util.so.0 /usr/lib/x86_64-linux-gnu/libxcb-util.so.1
Debian 12: Fix
NOTA: Comentar que el proceso ha sido probado sobre Debian 12 y Python 3.11
El bug consiste en la falta de librerías XCB:
sudo apt-get update && \
sudo apt-get install -y '^libxcb.*-dev' libx11-xcb-dev libglu1-mesa-dev libxrender-dev libxi-dev libxkbcommon-dev
libxkbcommon-x11-dev
Tasmotizer
A continuación nos aseguramos de estar ejecuando el Entorno gráfico del Sistema y podremos lanzar desde la terminal la aplicación con este sencillo comando:
tasmotizer.py
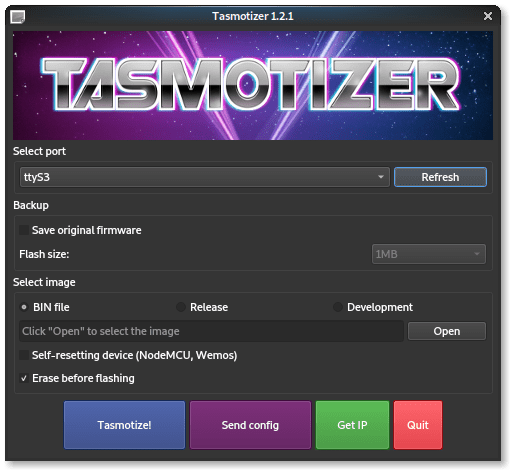
Vista de interfaz de la aplicación tras su ejecución:
Y vista del apartado de configuración:

Y listo!